鱼鳍和昆虫翅膀是自然界令人惊叹的工程杰作,能够有效地在水或空气中移动。长期以来,人们在创造游泳或飞行机器时一直以动物为模型,设计带有机翼的飞机和带有鳍状舵的船只。在过去的几十年里,加州理工学院和其他地方的研究人员一直在探索仿生工程,看看其他自然运动形式是否能为机械工程提供参考。
《仿生扑翼机器人推进器损伤补偿策略》发表在7月3日出版的《皇家学会界面杂志》上。
许多动物都利用拍打翅膀来推进,配备拍打翅膀的机器人也能有效地推动自己。但动物界的拍打翅膀的动物——这里指的是鱼和昆虫——还有另一招。即使翅膀或鳍受损,这些动物也能调整运动机制来弥补。有些鱼类在鳍受损76%的情况下仍能存活下来,并且仍然能够游泳。
机器人飞碟能实现同样的壮举吗?这个问题启发了MoryGharib(1983年博士)实验室的一项研究。MoryGharib是HansW.Liepmann航空和医学工程教授、自主系统和技术中心(CAST)主任兼Booth-Kresa领导主席,也是加州理工学院研究生航空航天实验室主任。
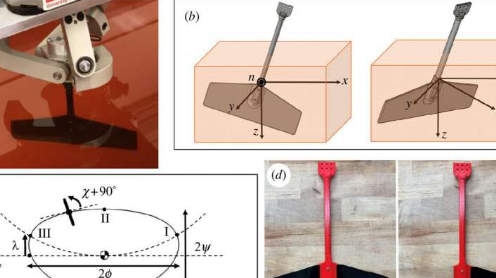
Gharib与航空航天研究生MeredithHooper和机械与土木工程博士后研究员IsabelScherl一起分析了油箱中拍打机器人的运动,由于信噪比高,油箱比水箱的测量结果更准确。然后,他们切除了机器人拍打器的一部分。
用于推进适应的机器学习
如果不进行干预,机器人仍会在水箱中徒劳地拍打翅膀,失去游泳能力。但除了仿生推进之外,研究人员还为机器人进行了仿生适应。受伤后,鱼和昆虫会尝试以新的方式推动自己,不断尝试,直到找到可以恢复完全活动的划水机制。
为了模仿这一过程,机器人被编程为反复试验各种冲程机制,然后通过机器学习进行评估。最终,机器人就像受伤的鱼或昆虫一样,即使50%的襟翼被移除,也能利用受损的襟翼成功实现替代推进方式。
“机器人尝试以10种不同的方式游泳,”Hooper解释道。“测量它在油箱中游泳时的力量,以便我们可以比较力量的产生和效率。机器学习算法根据它们产生我们期望的力量的程度来选择最佳候选轨迹。然后,该算法根据前一组轨迹的启发,得出另一组10条轨迹。
“这个学习过程不断重复——评估、修改和创造——直到顶尖候选人都或多或少地变得相同,学会了在给定力量产生下最有效的游泳动作。”
自主机器人只有在因某种损坏或故障而失去自主能力之前,才会具有自主性。通过赋予机器人机制通过机器学习适应变化的能力,其自主性范围得以扩大。
正如胡珀所说,“自主水下航行器(AUV)提供了有关海洋如何运作的重要信息——深海中存在什么,人类活动如何扰乱海洋动态——但建造和部署成本非常高。如果没有这种适应手段,如果AUV的推进系统在人迹罕至的地区发生故障,它基本上就会成为海洋垃圾。我们的发现应该会增加AUV成功完成任务并被回收的可能性。”
“通过机器学习实现的适应性还可以改善微型飞行器(MAV)的功能,这种飞行器可以在紧急响应场景中导航复杂地形中的小间隙,例如在后搜寻被困人员。这种地形使得MAV在搜索过程中更容易受损。我们的发现可以使MAV更坚固,更适合部署在损坏可能很常见的具有挑战性的环境中,”Hooper说。
虽然实验机器人和活体动物都可以调整其划水机制以适应损伤,但它们所做的调整并不相同。从理论上讲,在所有情况下,拍击器(或鳍或翅膀)都应改变振幅和频率,以便在损伤后实现最佳推进力。但大多数针对鳍损伤鱼类的研究表明,鱼类会增加其划水振幅,但不一定增加其划水频率来补偿损伤,而机器人则同时修改了振幅和频率。
“这很可能是由于鱼类和昆虫受到的进化压力所致,而这些压力与机器人的使用情况无关,”胡珀解释道。“拍打机器人如何最好地适应损伤并不一定模仿自然。”