模仿学习是一种很有前途的方法,可以教会机器人如何可靠地完成日常任务,例如洗碗或做饭。尽管模仿学习框架潜力巨大,但它依赖于详细的人类演示,其中应包括可以帮助使用机器人系统重现特定动作的数据。
收集这些演示的一种方法是使用遥控系统,该系统允许人类控制机器人操纵器的运动以完成特定任务。然而,大多数现有的遥控系统都难以有效地处理和重现人类执行的复杂而协调的动作。
加州大学圣地亚哥分校的研究人员最近开发了Bunny-VisionPro,该系统可实现机器人系统的远程操作,以完成双手灵巧的操作任务。该系统在arXiv预印本服务器上发布的一篇论文中进行了介绍,可以方便收集人类的示范,以进行模仿学习。
论文共同作者王小龙告诉TechXplore:“我们最近发表的论文受到了推动机器人双手灵巧遥控操作需求的启发。”
“我们认识到现有的基于视觉的遥控系统很少关注双手控制,而这对于需要手部协调的复杂任务至关重要。”
王和他的同事最近研究的主要目标是开发一种通用的遥控系统,该系统可以很好地应用于不同类型的机器人和任务,大大简化用于训练机器人控制算法的演示收集。
他们开发的系统名为Bunny-VisionPro,可以使远程操作和演示数据的收集像在虚拟现实(VR)中玩游戏一样直观和身临其境。
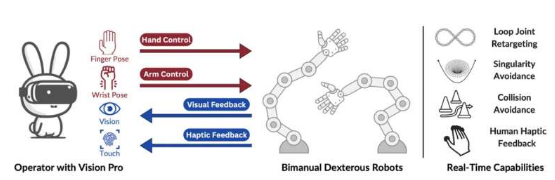
王教授解释道:“Bunny-VisionPro是一款创新的双手灵巧遥控系统,可让人类操作员实时控制双机械臂和多指手。它能够收集高质量的演示,以促进模仿学习。”
用户研究测试我们系统的远程操作任务。左图:将球从一个洞移到另一个洞。右图:递上一个玩具。图片来源:Ding等人
通过团队系统远程操作的设备轻便便携。用户在远程操作该设备时,还可以获得视觉和触觉反馈,让他们的体验更加身临其境。
在初步测试中,Bunny-VisionPro系统被发现能够实时、低延迟地安全控制机器人操纵器,同时还能防止与附近物体发生碰撞。值得注意的是,该系统还易于在实验室环境中安装和部署,使其成为在机器人实验室收集演示的有前途的解决方案。
Bunny-VisionPro有三个关键组件:手臂运动控制模块、手部和运动重定向模块以及触觉反馈模块。
“手臂运动控制模块将人类手腕姿势重新定位到机器人末端执行器姿势,处理奇异性和碰撞问题,”王说。“手部和运动重新定位模块将人类手部姿势映射到机器人手部姿势,包括对环状关节结构的支持。最后,触觉反馈模块通过算法和硬件设计将机器人触觉感知转换为人类触觉反馈。”
王教授及其同事开发的新型远程操作系统的主要优势在于,它能够实时安全地控制双手机器人系统。与过去推出的其他几种解决方案相比,该系统还集成了触觉和视觉反馈,使演示器集合对人类用户来说更具沉浸感,同时也提高了系统的远程操作成功率。
“我们开发的实时双手灵巧遥控系统有效地平衡了安全性和性能,”王说。“该系统能够以最小的延迟控制机器人手臂和多指手,同时结合了防撞和奇点处理。这对于在现实世界的机器人应用中可靠地工作非常重要。”
王和他的同事最近开展的这项研究可以大大简化使用远程操作来收集模仿学习框架的演示的过程。未来,Bunny-VisionPro可以部署在全球其他机器人实验室,并可以启发类似沉浸式机器人远程操作系统的开发。
“在我们接下来的研究中,我们计划利用机器人的触觉信息进一步增强操控能力,以提高精度和适应性,”王补充道。“我们系统的代码是开源的,可以在GitHub上访问。”