一种在3D环境中规划和控制人形机器人运动的新模型
人形机器人,即身体结构与人体相似的机器人或虚拟系统,在现实世界中有着广泛的应用。由于它们的四肢和身体与人类相似,因此可以模拟各种人类动作,如行走、蹲伏、跳跃、游泳等。
通过计算生成虚拟人形角色的逼真动作可能对视频游戏、动画电影、虚拟现实(VR)体验和其他媒体内容的开发产生有趣的影响。然而,视频游戏和动画中描绘的环境通常高度动态且复杂,这使得在这些环境中引入人形机器人的动作规划更具挑战性。
以色列NVIDIA研究中心的研究人员最近推出了PlaMo(规划和移动),这是一种新的计算方法,用于规划人形机器人在复杂的3D物理模拟世界中的移动。他们在arXiv预印本服务器上发表的一篇论文中介绍了这种方法,该方法由场景感知路径规划器和强大的控制策略组成。
阿萨夫·哈拉克(AssafHallak)、加尔·达拉尔(GalDalal)及其同事在论文中写道:“在复杂的物理模拟世界中控制人形机器人是一项长期存在的挑战,在游戏、模拟和视觉内容创作领域有着众多应用。”
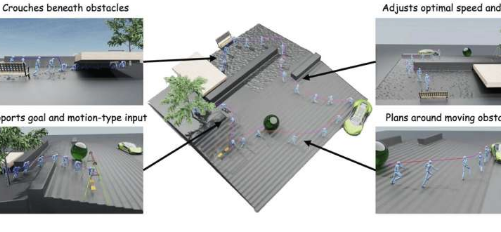
“在我们的设置中,给定一个丰富而复杂的3D场景,用户提供由目标位置和运动类型组成的指令列表。为了解决这个任务,我们提出了PlaMo,一个场景感知路径规划器和一个强大的基于物理的控制器。”
之前大多数旨在规划3D模拟环境中人形角色运动的研究都侧重于规划器或控制器的开发,而不是两者兼而有之。由于这两类模型执行的任务(即规划和执行人形机器人的运动)是相互依赖的,Hallak、Dalal及其同事着手设计一种能够同时解决这两个问题的计算方法。
Hallak、Dalal及其同事写道:“路径规划器会生成一系列运动路径,同时考虑到场景对运动施加的各种限制,例如位置、高度和速度。作为规划器的补充,我们的控制策略会根据规划生成丰富而逼真的物理运动。”
研究人员在一系列模拟中测试了PlaMo,使用它来规划和执行SMPL人形机器人的动作,SMPL人形机器人是一种具有中性身体结构(即没有面部特征、头发、衣服等)的人形虚拟代理。他们在IsaacGym上运行了模拟,IsaacGym是NVIDIA开发的基于物理的强化学习模拟环境。
这些测试的结果非常令人鼓舞,因为PlaMo方法被发现能够按照文本指令有效地规划和执行SMPL人形机器人在复杂模拟景观中的运动。值得注意的是,该方法的规划器组件被发现能够解释人形角色在不平坦地形上的运动,以及环境中的静态和动态障碍物。
反过来,我们发现运动控制器能够可靠地跟踪规划器规划的路径,为人形机器人执行复杂且场景感知的动作,例如在低垂的天花板下爬行或快速移动以避开接近的障碍物。
总体而言,这两个模块的组合非常有效,可以根据环境的变化产生逼真的动作。
“PlaMo专注于规划和控制,”Hallak、Dalal和他们的同事写道。“它为将其与现代语言模型和3D场景理解相结合提供了机会。考虑到这些扩展,我们将PlaMo视为一个更大系统的垫脚石,在这个系统中,非玩家角色(NPC)被赋予角色来扮演,形成一个丰富的模拟虚拟世界。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【木地板材料】木地板是一种广泛应用于家居和商业空间的地面装饰材料,因其自然美观、耐用性强、环保性好等特...浏览全文>>
-
【木地板安装】木地板安装是一项需要细致规划和专业操作的工程,无论是新房装修还是旧房翻新,选择合适的木地...浏览全文>>
-
【木的组词怎么写】在汉语学习中,词语的积累和运用是非常重要的部分。对于“木”这个字来说,它不仅是常见的...浏览全文>>
-
【木的象形字有哪些字】在汉字的发展过程中,许多字最初都是通过象形的方式创造出来的,用来表示具体的事物。...浏览全文>>
-
【木岛法子介绍】木岛法子(Kazuko Kikuchi)是日本著名演员、模特及艺人,以其在影视作品中的出色表现和独特...浏览全文>>
-
【木代尔是什么面料】“木代尔是什么面料”是许多消费者在选购衣物时常常会提出的问题。木代尔是一种天然纤维...浏览全文>>
-
【木代尔和莫代尔哪种面料好】在选择衣物面料时,很多人会遇到“木代尔”和“莫代尔”这两个名称,容易混淆它...浏览全文>>
-
【萝卜的营养价值】萝卜是一种常见的根茎类蔬菜,不仅味道清脆爽口,还具有丰富的营养价值。无论是生吃、炒食...浏览全文>>
-
【萝卜的药用功效和作用】萝卜,作为日常生活中常见的蔬菜之一,不仅味道清脆、营养丰富,还具有多种药用价值...浏览全文>>
-
【萝卜的家常做法】萝卜是一种非常常见的蔬菜,不仅价格实惠,而且营养丰富,适合多种烹饪方式。无论是炖、炒...浏览全文>>