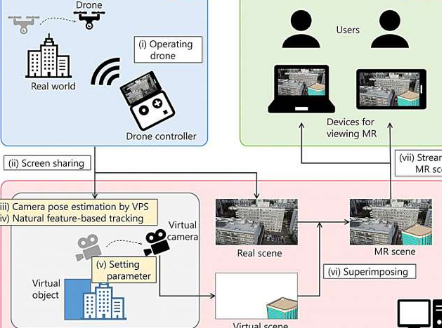
大阪大学的一个研究小组开发了一种创新的定位系统,该系统可以正确对齐现实世界和虚拟世界的坐标,而无需事先定义路线。这是通过整合两种基于视觉的自我定位估计方法实现的:视觉定位系统(VPS)和基于自然特征的跟踪。
这项进展将利用市场上现有的无人机实现多功能无人机混合现实(MR)。该研究发表在《无人机系统与应用》杂志上。
预计未来基于无人机的MR将用于各种应用,例如城市景观模拟以及对维护和检查工作的支持,从而有助于无人机应用的进一步发展,特别是在建筑、工程和施工(AEC)领域。
近年来,人们对无人机在各个领域的应用越来越感兴趣,尤其是在AEC领域。由于无人机在时间、准确性、安全性和成本方面的优越性,其在AEC领域的应用不断扩大。
无人机与MR的结合是一种很有前景的途径,因为它不受用户行动范围的限制,并且在对城市和建筑物等大规模空间进行景观模拟时非常有效。
先前的研究提出了使用屏幕共享和流媒体传输等多功能技术将MR与商用无人机相结合的方法;然而,这些方法需要预先定义无人机飞行路线以匹配现实世界和虚拟世界的运动,从而降低了应用的多功能性并限制了MR的使用案例。
虽然这项研究没有实现基于无人机的MR应用以供实际使用,但所提出的对准系统具有高度的通用性,并且在未来有可能实现各种附加功能。
这使我们距离实现以无人机为中心的MR应用更近了一步,该应用可用于建筑项目的整个生命周期,从设计和规划的初始阶段到维护和检查等后期阶段。
第一作者AiriKinoshita表示:“无人机与MR的结合有可能解决各种社会问题,例如城市规划和基础设施开发与维护、灾难响应和人道主义援助、文化保护和旅游以及环境保护等问题,因为这样可以让MR用户摆脱只能体验周边环境的限制,从而以更自由的视角进行MR表达。”