一种简单快速制造具有逼真运动的仿生机器人的新方法
仿生机器人模仿生物体的运动和生物功能,是一个令人着迷的研究领域,它不仅可以带来更高效的机器人,而且可以作为理解肌肉生物学的平台。
其中,生物混合执行器由软材料和肌肉细胞组成,可以复制实际肌肉的力量,有潜力实现逼真的运动和功能,包括自愈、高效率和高功率重量比这对于需要大量能源的传统笨重机器人来说是很困难的。
实现这些逼真运动的一种方法是以各向异性方式在生物混合执行器中排列肌肉细胞。这涉及到以特定的模式排列它们,使它们朝向不同的方向,就像在生物体中发现的那样。
虽然之前的研究报告了使用这种技术进行显着运动的生物混合执行器,但它们主要集中在各向异性地沿直线排列肌肉细胞,从而仅产生简单的运动,而不是天然肌肉组织的复杂运动,例如扭转、弯曲、和缩小。真实的肌肉组织具有复杂的肌肉细胞排列,包括弯曲和螺旋图案。
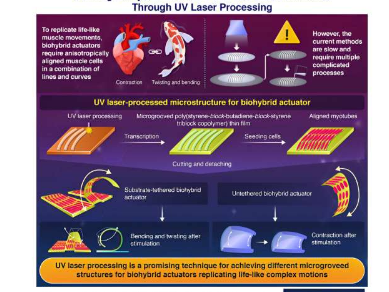
创建如此复杂的排列需要在基底上形成弯曲的微槽(MG),然后将其作为按照所需图案排列肌肉细胞的指导。复杂MG的制造已通过光刻、波浪显微照相和微接触印刷等方法实现。然而,这些方法涉及多个复杂的步骤,不适合快速制造。
为了解决这个问题,日本东京工业大学(TokyoTech)生命科学与技术学院ToshinoriFujie副教授领导的研究小组开发了一种用于制造复杂微结构的紫外(UV)激光加工技术。
“基于我们之前的原型,我们假设使用SBS(硬橡胶)薄膜和通过紫外激光加工制造的任意各向异性MG的生物混合执行器可以控制任意各向异性方向上的细胞排列,以重现更逼真的灵活运动,”藤杰博士解释道。他们的研究发表在《生物制造》杂志上。
这项新技术包括通过紫外激光加工在聚酰亚胺上形成弯曲的MG,然后将其转录到由SBS制成的薄膜上。接下来,在生物体中发现的称为肌管的骨骼肌细胞使用MG进行排列,以实现各向异性的弯曲肌肉模式。
研究人员使用这种方法开发了两种不同的生物混合致动器:一种束缚在玻璃基板上,另一种则不受束缚。在电刺激下,两个执行器通过类似扭转的运动而变形。有趣的是,由于肌管像天然括约肌一样弯曲排列,生物混合执行器在不受束缚时转变成3D独立结构。
“这些结果表明,与传统方法相比,紫外激光是一种更快、更容易制造可调谐MG图案的方法。这种方法为通过肌管的引导对准来实现更逼真的生物混合致动器提供了有趣的机会,”博士评论道福杰。
总的来说,这项研究证明了紫外激光加工在制造不同的各向异性肌肉组织图案方面的潜力,为能够进行复杂、灵活运动的更逼真的生物混合致动器铺平了道路。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【木地板材料】木地板是一种广泛应用于家居和商业空间的地面装饰材料,因其自然美观、耐用性强、环保性好等特...浏览全文>>
-
【木地板安装】木地板安装是一项需要细致规划和专业操作的工程,无论是新房装修还是旧房翻新,选择合适的木地...浏览全文>>
-
【木的组词怎么写】在汉语学习中,词语的积累和运用是非常重要的部分。对于“木”这个字来说,它不仅是常见的...浏览全文>>
-
【木的象形字有哪些字】在汉字的发展过程中,许多字最初都是通过象形的方式创造出来的,用来表示具体的事物。...浏览全文>>
-
【木岛法子介绍】木岛法子(Kazuko Kikuchi)是日本著名演员、模特及艺人,以其在影视作品中的出色表现和独特...浏览全文>>
-
【木代尔是什么面料】“木代尔是什么面料”是许多消费者在选购衣物时常常会提出的问题。木代尔是一种天然纤维...浏览全文>>
-
【木代尔和莫代尔哪种面料好】在选择衣物面料时,很多人会遇到“木代尔”和“莫代尔”这两个名称,容易混淆它...浏览全文>>
-
【萝卜的营养价值】萝卜是一种常见的根茎类蔬菜,不仅味道清脆爽口,还具有丰富的营养价值。无论是生吃、炒食...浏览全文>>
-
【萝卜的药用功效和作用】萝卜,作为日常生活中常见的蔬菜之一,不仅味道清脆、营养丰富,还具有多种药用价值...浏览全文>>
-
【萝卜的家常做法】萝卜是一种非常常见的蔬菜,不仅价格实惠,而且营养丰富,适合多种烹饪方式。无论是炖、炒...浏览全文>>