大多数人认为穿衣服是理所当然的。但国家卫生统计中心的数据显示,92%的护理机构居民和家庭护理患者在穿衣方面需要帮助。
卡内基梅隆大学机器人研究所(RI)的研究人员看到了机器人可以帮助满足这一需求的未来,并正在努力使其成为可能。
RI博士YufeiWang表示:“值得注意的是,机器人辅助穿衣方面的现有努力主要假设手臂姿势范围有限,并且使用单一的固定服装,例如医院的病号服。”学生正在研究机器人辅助穿衣系统。
“开发一个通用系统来解决各种日常服装和不同的运动功能能力是我们的首要目标。我们还希望将该系统扩展到具有不同程度的手臂运动受限的个人。”
机器人辅助穿衣系统利用人工智能的能力来适应各种人体形状、手臂姿势和服装选择。该团队的研究使用强化学习(完成某些任务的奖励)来实现他们的通用着装系统。具体来说,每次机器人正确地将衣服沿着人的手臂放置得更远时,研究人员都会给予机器人积极的奖励。通过持续强化,他们提高了系统学习着装策略的成功率。
研究人员通过模拟来教机器人如何操纵衣服和给人们穿衣服。当将模拟中学到的策略转移到现实世界时,团队必须仔细处理服装材料的属性。
“在模拟阶段,我们故意采用随机化的不同服装属性来指导机器人学习的着装策略,以涵盖广泛的材料属性,”参与该项目的RI硕士生ZhanyiSun说道。“我们希望模拟中随机变化的服装属性能够封装现实世界中服装的属性,这样在模拟环境中学到的着装策略就可以无缝地转移到现实世界中。”
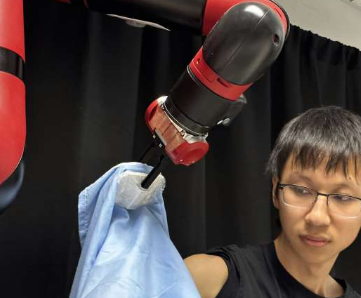
RI团队在一项人体研究中评估了机器人穿衣系统,对17名具有不同体型、手臂姿势和五件衣服的参与者进行了510次穿衣试验。对于大多数参与者来说,系统能够将每件衣服的袖子完全拉到他们的手臂上。对所有测试用例进行平均后,系统覆盖了参与者手臂长度的86%。
研究人员在设计系统时必须考虑几个挑战。首先,衣服本质上是可变形的,这使得机器人很难感知整件衣服并预测它会移动到哪里以及如何移动。
“衣服与能够进行状态估计的刚性物体不同,因此我们必须对可变形物体使用高维表示,以便让机器人感知衣服的当前状态以及它们如何与人类手臂互动,”王说。“我们使用的表示称为分段点云。它将衣服的可见部分表示为一组点。”
安全的人机交互也至关重要。重要的是,机器人应避免对人的手臂施加过大的力以及任何可能导致不适或危及个人安全的其他行为。为了降低这些风险,团队奖励了机器人的温和行为。
未来的研究可能会朝几个方向发展。例如,该团队希望扩展当前系统的功能,使其能够将夹克穿在人的双臂上或将T恤套在头上。这两项任务都需要更复杂的设计和执行。该团队还希望能够适应人类在穿衣过程中的手臂动作,并探索更先进的机器人操作技能,例如扣扣子或拉拉链。
随着工作的进展,研究人员打算在护理机构内进行观察性研究,以深入了解个人的多样化需求以及当前辅助敷料系统需要进行的改进。
Wang和Sun最近在机器人学:科学与系统会议上展示了他们的研究成果“一项为所有人着装的政策:学习以不同的姿势和服装为人们着装”。该研究还发布在arXiv预印本服务器上。