近日,中国科学院深圳先进技术研究院课题组提出了一种由磁场驱动的仿生四足软薄膜微型机器人,质量仅为41毫克,有望应用于胃部检查和治疗。研究人员实现了软体微型机器人在磁场中的多模态运动控制以及软体微型机器人对微型物体的抓取和运输。
这篇发表在CyborgandBionicSystems上的新论文详细介绍了微型机器人的制造过程和磁化过程,介绍了微型机器人的运动和货物运输机制,并演示了微型机器人将多个微珠从不同位置运送到目标位置。
不受束缚的微型机器人因其在生物医学应用和小规模显微操作方面的潜力而受到广泛关注。“由于磁场对生物细胞和组织无害,磁场被广泛用于驱动微型机器人用于生物医学应用,”研究作者、中国科学院深圳先进技术研究所教授TiantianXu解释说。
受自然界中智能生物的启发,研究人员设计并制造了一种新型无绳四足软薄膜微型机器人,该机器人由4个具有特殊磁化轮廓的磁性软腿和一个非磁性薄膜主体组成。机器人结构简单,采用脱模技术制作,模具采用高精度3D打印工艺制作。
(A&B)当施加锥形磁场时,机器人可以在表面行走。(C&D)当施加旋转磁场时,机器人可以在表面滚动。图片来源:中国科学院深圳先进技术研究所ChenyangHuang
据研究人员称,通过使用不同的驱动磁场,微型机器人能够实现多模态运动,包括直行和滚动。通过产生圆锥形磁场,微型机器人可以交替移动双腿,实现在平面上行走,就像四足动物的步态。
四足微型机器人不仅具有稳定的多种运动模式和灵活的转向控制,而且可以在各种复杂的障碍环境中移动。微型机器人可以跨过3层台阶,每层台阶高度为1毫米。此外,四足微型机器人可以在充满凹槽的胃模型底部移动。
机器人可以跨过一些约2.2mm高的低矮障碍物。当障碍物高度较大时,微型机器人多模态运动的优势就会显现出来。在这种情况下,微型机器人可以切换到滚动模式来越过障碍物。
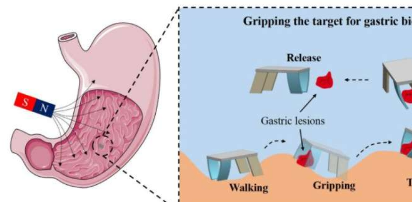
四足微型机器人不仅具有出色的越障能力,还具有出色的货物抓取能力。微型机器人本体横向磁场分量的大小可以调节微型机器人后腿之间的距离,从而实现货物的抓取和释放。
(A)四足微型机器人走过3段台阶。(B)四足微型机器人在充满凹槽的胃模型底部移动。图片来源:中国科学院深圳先进技术研究所黄晨阳。
研究人员成功控制微型机器人将2个不同位置的目标珠子运送到指定的目标位置,这实际上验证了抓取和运输货物的能力。至于负载能力,实验结果表明,微型机器人可以抓取和运输重量达自身重量3倍的物体。
与现有的已应用于医疗领域的有线软体机器人不同,深圳先进技术研究院提出的四足软体微型机器人由于具有多模态运动的优势,具有更好的移动能力、越障能力和目标运输能力。
展望未来,徐教授表示,四足软体微型机器人有望应用于胃部检查和治疗。他们将继续优化微型机器人设计,以实现更高效的运动和更好的抓取能力。