增强自动驾驶汽车匝道合并能力的强化学习框架
虽然现在许多汽车公司都在投资开发自动驾驶汽车,但迄今为止所创造的车辆尚未达到大规模部署所需的安全水平。为此,车辆需要能够安全有效地应对道路上的各种挑战。
卡内基梅隆大学的研究人员最近开发了一种基于强化学习(RL)的框架,可以帮助提高自动驾驶汽车在匝道合并场景中的性能,即匝道上的车辆偏离主干道的情况。他们的框架在arXiv上预发表的一篇论文中提出,可能有助于在这些特别重要的时期提高自动驾驶汽车的安全性,降低事故风险。
“约翰·多兰教授在卡内基梅隆大学的实验室研究各种自动驾驶应用已经有一段时间了,”开发该模型的研究人员之一SoumithUdatha告诉TechXplore。“我们在本文中关注的应用是高速公路合并,因为涉及高速车辆、不同风格的司机以及涉及的不确定性。”
Udatha和他的同事们研究工作的远大目标是提高自动驾驶汽车的安全性。在他们最近的论文中,他们特别尝试设计一个框架,该框架可以有效地捕捉匝道合并场景,并根据对任何不确定性和可能风险的分析来规划车辆的行动。
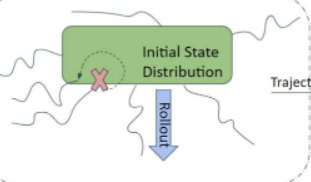
“RL模型与环境交互并收集数据以优化它们的奖励,但这种数据探索在部署到现实环境中时会遇到一些问题,”Udatha解释说。“这部分是因为并非智能体遇到的所有状态都是安全的。我们用控制屏障功能(CBF)来约束我们的RL策略,以确保在指定距离内的安全。因此,在环境约束下,我们忽略不安全状态并增强系统学习如何导航的能力。”
CBF是一类相当新的计算方法,旨在增强自治系统的安全控制。CBF可以直接应用于不同的优化问题,包括斜坡合并。尽管它们的质量很有前途,但它们执行的优化并没有考虑系统在探索环境时收集的数据。RL方法可以帮助填补这一空白。
“我们发现我们的算法可以扩展到离线和在线RL环境,”Udatha说。“由于我们现在拥有大量用于离线RL的数据,因此对离线数据集的训练最终可以产生更好的模型。根据我们的指标,我们还发现将概率CBF作为约束包含在内可以提供更好的安全性,因为它考虑了驾驶员的不确定性在一定程度上。”
Udatha和他的同事在一系列测试中测试了他们的框架,使用由英特尔实验室和巴塞罗那计算机视觉中心的一组研究人员开发的在线版CARLA模拟器。在这些模拟中,他们的方法取得了显著成果,凸显了其在匝道合并期间提高自动驾驶车辆安全性的可能价值。
“我们现在计划通过训练我们的模型来扩展我们的研究,以在驾驶员不确定的场景中将自动驾驶汽车与多辆汽车合并,”Udatha补充道。“我们还发现目前缺少用于比较各种匝道合并方法的标准基准,因此我们正在同时尝试为NGSIM建立匝道合并基准,NGSIM是NHTSA在美国I-80和US101上发布的高速公路数据集高速公路。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【萝卜的药用功效和作用】萝卜,作为日常生活中常见的蔬菜之一,不仅味道清脆、营养丰富,还具有多种药用价值...浏览全文>>
-
【萝卜的家常做法】萝卜是一种非常常见的蔬菜,不仅价格实惠,而且营养丰富,适合多种烹饪方式。无论是炖、炒...浏览全文>>
-
【萝卜的功效与作用与主治】萝卜是一种常见的根茎类蔬菜,广泛种植于世界各地,具有丰富的营养价值和多种药用...浏览全文>>
-
【萝卜刀怎么玩儿】“萝卜刀”作为一种近年来在网络上逐渐流行的玩具,因其独特的玩法和趣味性吸引了大量年轻...浏览全文>>
-
【萝卜刀是什么】“萝卜刀”是近年来在网络上迅速走红的一种玩具,因其外形酷似胡萝卜而得名。它不仅是一种简...浏览全文>>
-
【萝卜刀的危害】近年来,“萝卜刀”作为一种新型玩具,因其造型独特、操作简单而受到部分青少年的喜爱。然而...浏览全文>>
-
【萝卜车多少钱一辆】“萝卜车多少钱一辆”是许多消费者在选购新能源汽车时最关心的问题之一。萝卜车,即“萝...浏览全文>>
-
【10月14日是什么纪念日】10月14日是每年都会被不同国家和地区以不同方式纪念的日子。这一天在历史、文化、政...浏览全文>>
-
【10月14号是什么星座的】10月14日是阳历日期,对应的星座是天秤座(9月23日—10月22日)。天秤座的人通常性格...浏览全文>>
-
【10月13日五行穿衣】10月13日,根据中国传统五行理论,结合当天的天干地支与五行属性,可以为不同体质和命理...浏览全文>>